Сравнение методов РК разных порядков¶
Возьмем в качестве модельной задачи задачу о движении тела в поле Земли и Луны (орбита Аренсторфа) $$ x'' = x + 2y' - M \frac{x+m}{\sqrt{(x+m)^2 + y^2}^3} - m \frac{x-M}{\sqrt{(x-M)^2 + y^2}^3}\\ y'' = y - 2x' - M \frac{y}{\sqrt{(x+m)^2 + y^2}^3} - m \frac{y}{\sqrt{(x-M)^2 + y^2}^3}\\ m = 0.012277471,\; M = 1 - m\\ x(0) = 0.994,\; y(0) = 0\\ x'(0) = 0, \; y'(0) = -2.001585106379 $$
import numpy as np
# Вычисляет правую часть системы ОДУ
# du/dt = aren(t, u)
def aren(t, u):
x, y, vx, vy = u
m = 0.012277471; M = 1 - m
Dm = ((x+m)**2+y**2)**(1.5);
De = ((x-M)**2+y**2)**(1.5)
return np.array([vx, vy,
x+2*vy-M*(x+m)/Dm-m*(x-M)/De,
y-2*vx-M* y /Dm-m* y /De])
aren_init = np.array([0.994, 0, 0, -2.001585106379])
aren_tmax = 17.06521656015796
Методы¶
Решать задачу будем явными методами Рунге-Кутты 1го, 2го и 4го порядков со следующими таблицами Бутчера: $$ \overset{\text{Euler}}{ \begin{array}{c|c} 0 & \\ \hline & 1 \end{array}} \qquad \overset{\text{Midpoint}}{ \begin{array}{c|cc} 0 & \\ 1/2 & 1/2 \\ \hline & 0 & 1 \end{array}} \qquad \overset{\text{RK4}}{ \begin{array}{c|cccc} 0 & \\ 1/2 & 1/2 \\ 1/2 & 0 & 1/2 \\ 1 & 0 & 0 &1 \\ \hline & 1/6 & 1/3 & 1/3 & 1/6 \end{array}} $$
def euler(f, tau, t, u):
k1 = f(t, u)
return u + tau * k1
euler.order = 1; euler.name = 'Явный метод Эйлера'
def midpoint(f, tau, t, u):
k1 = f(t, u)
k2 = f(t + tau/2, u + tau/2*k1)
return u + tau * k2
midpoint.order = 2; midpoint.name = 'Явный метод средней точки'
def rk4(f, tau, t, u):
k1 = f(t, u)
k2 = f(t + tau/2, u + tau/2*k1)
k3 = f(t + tau/2, u + tau/2*k2)
k4 = f(t + tau , u + tau *k3)
return u + tau * (k1 + 2*k2 + 2*k3 + k4) / 6
rk4.order = 4; rk4.name = 'Классический метод РК 4 порядка'
def fixed_stepsize(f, y0, tmax, method, tau=0.1):
t = 0; u = y0
T = [0]; Y = [y0]
name = method.name
while t < tmax:
# Если последний шаг выхдит за tmax - уменьшаем tau
if t + tau > tmax: tau = tmax - t
u = method(f, tau, t, u)
t += tau;
T.append(t)
Y.append(u)
print('%s, всего шагов: %d'%(name, len(T)-1))
return np.array(T), np.array(Y)
Метод с выбором шага¶
Методы Рунге-Кутты без проблем работают с неравномерной сеткой по времени. Значение $\tau_n = t_{n+1} - t_n$ может быть задано независимо от $\tau_{n-1}, \tau_{n-2}, \dots$ на предыдущих шагах. Обычно шаг стараются выбрать так, чтобы погрешность метода на каждом интервале $[t_n, t_{n+1}]$ не превышала заданную величину $\varepsilon$. Оценить погрешность на данном шаге можно пользуясь правилом Рунге. Более эффективный способ оценки погрешности дают вложенные методы Рунге-Кутты.
def adaptive_stepsize(f, y0, tmax, method, tol, tau=0.1):
t = 0; u = y0
T = [0]; Y = [y0]
p = method.order; name = method.name
failed = 0 # Число неудачных шагов
while t < tmax:
if t + tau > tmax: tau = tmax - t
u1 = method(f, tau, t, u) # Целый шаг
u2 = method(f, tau/2, t, u)
u2 = method(f, tau/2, t+tau/2, u2) # Два полушага
err = np.linalg.norm(u1-u2)/(1-2**-p) # Правило Рунге
fac = (tol/err)**(1 / (p+1)) # Подстраиваем tau
taunew = tau * min(2, max(0.25, 0.8 * fac))
if err < tol: # Ошибка мала, принимаем шаг
t += tau; u = u1
T.append(t); Y.append(u)
else: # Если ошибка велика, повторяем шаг с новым tau
failed += 1
tau = taunew
print('%s, всего шагов: %d, отброшено: %d'%(name, len(T)-1, failed))
return np.array(T), np.array(Y)
T, Y = adaptive_stepsize(aren, aren_init, aren_tmax, euler, 1e-4)
orbit_plot(Y, skip=20) # Отмечаем точкой каждый 20й шаг

T, Y = adaptive_stepsize(aren, aren_init, aren_tmax, midpoint, 1e-4)
orbit_plot(Y, skip=5) # Отмечаем точкой каждый 5й шаг

T, Y = adaptive_stepsize(aren, aren_init, aren_tmax, rk4, 1e-4)
orbit_plot(Y, skip=1) # Отмечаем точкой каждый шаг

T, Y = fixed_stepsize(aren, aren_init, aren_tmax, rk4, aren_tmax/5000)
orbit_plot(Y, skip=50) # Отмечаем точкой каждый 50й шаг

Жесткие задачи¶
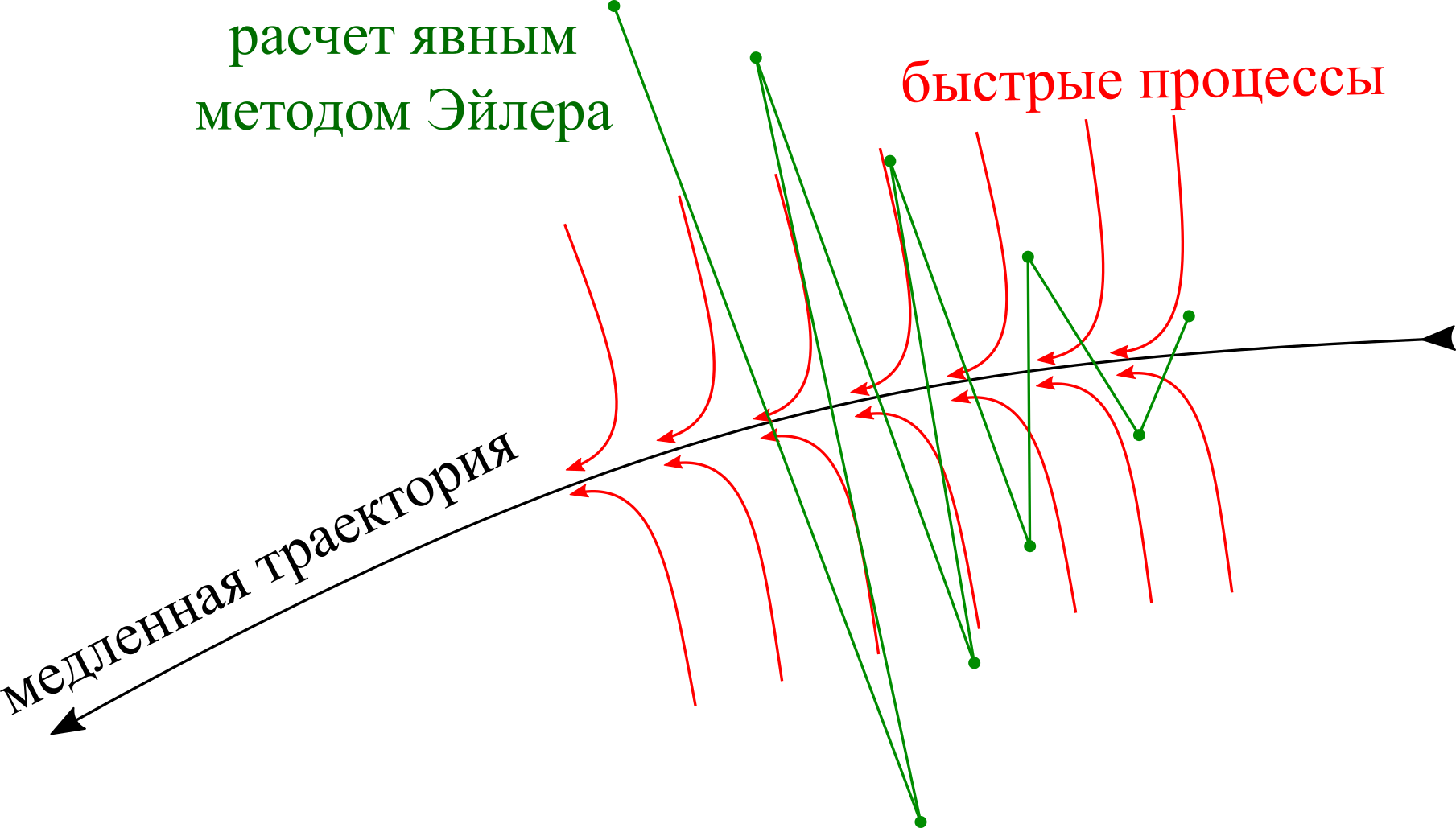
Жесткие системы ОДУ описывают, как правило, одновременно проходящие очень быстрые и очень медленные процессы. Например, в задачах химической кинетики бывают различия в скоростях реакций до $10^{15}$ раз.
Оказывается, что быстро протекающие процессы, даже быстро закончившись, продолжают влиять на численное решение задачи, вынуждая рассчитывать решение с очень малым шагом по времени, где это, казалось бы, совершенно не требуется (решение довольно гладкое).
Пример жесткой задачи из хим. кинетики¶
Рассмотрим две реакции $$ \mathrm{X} \overset{\text{slow}}{\to} \mathrm{Z}\\ \mathrm{Y} \overset{\text{fast}}{\to} \mathrm{X}, $$ причем первая — медленная, а вторая — быстрая. $$ \frac{dx}{dt} = -0.5 x + 30y\\ \frac{dy}{dt} = -30y\\ $$
def chem(t, u):
x, y = u
return np.array([-0.5*x+30*y, -30*y])
chem_init = np.array([0, 1])
chem_tmax = 5
T, Y = adaptive_stepsize(chem, chem_init, chem_tmax, euler, 1e-2)
T2, Y2 = adaptive_stepsize(lambda t,u:-0.5*u, np.array([1]), chem_tmax, euler, 1e-2)
plt.figure(figsize=(14, 5))
plt.subplot(1,2,1); plt.plot(T, Y[:, 0], '.-'); plt.grid();
plt.subplot(1,2,2); plt.plot(T2, Y2[:, 0], '.-') # <<похожая>> задача
plt.grid(); plt.show()

Ручное управление шагом¶
Попробуем руками увеличить шаг в "гладкой" области.
T1, Y1 = adaptive_stepsize(chem, chem_init, 0.5, euler, 1e-2)
T2, Y2 = fixed_stepsize(chem, Y1[-1,:], chem_tmax-0.5, euler, 0.08)
plt.plot(T1, Y1[:, 0], '.-')
plt.plot(T2+0.5, Y2[:, 0], '.-')
plt.axis([0, 5, 0, 1])
plt.grid(); plt.show()

Жесткая устойчивость¶
Решение выглядит как неустойчивое. Но сам метод устойчив (как любой метод Рунге-Кутты) и при уменьшении шага этот эффект пропадает. Все явные методы подвержены этой проблеме — они продолжают чувствовать быстрые процессы даже после того, как они прекращают существенно влиять на решение.
Однако, некоторые неявные методы вполне хорошо такие задачи решают. Такие методы называют А-устойчивыми.
def newton(F, dFdx, x0):
x = x0.copy()
for it in range(50):
dx = np.linalg.solve(dFdx(x), F(x))
x -= dx
if np.linalg.norm(dx) < 1e-12:
return x
print('Максимальное число итераций превышено!')
return x
def imeuler(f, h, t, u):
E = np.eye(len(u))
k1 = newton(
lambda k: k - f(t+h, u+h*k), # Уравнение k-f(t+h,u+h*k) = 0
lambda k: E - h*f(t+h, u+h*k, jac=True), # Производная по k
f(t, u)) # Начальное приближение
return u + h*k1
imeuler.order=1; imeuler.name='Неявный Эйлер'
def immidpoint(f, h, t, u):
E = np.eye(len(u))
k1 = newton(
lambda k: k - f(t+h/2, u+h/2*k), # Уравнение k-f(t+h/2,u+h/2*k) = 0
lambda k: E - h*f(t+h/2, u+h/2*k, jac=True), # Производная по k
f(t, u)) # Начальное приближение
return u + h*k1
immidpoint.order=2; immidpoint.name='Неявная средняя точка'
# Добавим вычисление производной, необходимой для метода Ньютона
def chem(t, u, jac=False):
x, y = u
if jac:
return np.array([[-0.5, 30], [0, -30]])
return np.array([-0.5*x+30*y, -30*y])
T, Y = adaptive_stepsize(chem, chem_init, chem_tmax, imeuler, 1e-2)
plt.plot(T, Y[:, 0], '.-')
plt.grid(); plt.show()

T, Y = adaptive_stepsize(chem, chem_init, chem_tmax, immidpoint, 1e-2)
plt.plot(T, Y[:, 0], '.-')
plt.grid(); plt.show()

Счет всюду с большим шагом¶
Оказывается, для некоторых методов даже необязательно измельчать шаг в области быстрых процессов! Если точность не критична, а необходимо просто получить качественную картину процесса, эти методы могут быть удобны.
Такие методы называются L-устойчивыми.
T, Y = fixed_stepsize(chem, chem_init, chem_tmax, imeuler, 0.2)
plt.plot(T, Y[:, 0], '.-')
plt.ylim(0, 1)
plt.grid(); plt.show()

T, Y = fixed_stepsize(chem, chem_init, chem_tmax, immidpoint, 0.2)
plt.plot(T, Y[:, 0], '.-')
plt.ylim(0, 1)
plt.grid(); plt.show()

Возмущения решения¶
Расмотрим решение $\mathbf y(t)$, удовлетворяющее системе $\frac{d\mathbf y(t)}{dt} = \mathbf G(t, \mathbf y(t))$.
Пусть $\mathbf y(t) + \boldsymbol \epsilon(t)$ — близкое решение той же системы. Тогда в первом приближении отклонение $\boldsymbol \epsilon(t)$ удовлетворяет линейному дифференциальному уравнению $$ \frac{d\boldsymbol \epsilon(t)}{dt} = \mathbf A(t) \boldsymbol \epsilon(t), \qquad \mathbf A(t) = \frac{\partial \mathbf G}{\partial \mathbf y}(t, \mathbf y(t)). $$
Модельное уравнение для возмущения¶
Понять, как ведет себя решение $$ \frac{d\boldsymbol \epsilon(t)}{dt} = \mathbf A(t) \boldsymbol \epsilon(t), $$ можно рассматривая совокупность модельных скалярных уравнений $$ \frac{d\epsilon}{dt} = \lambda \epsilon, \qquad \lambda \in \lambda(\mathbf A). $$ Таким образом, о поведении возмущений трактории в задаче можно судить по спектру матрицы Якоби системы.
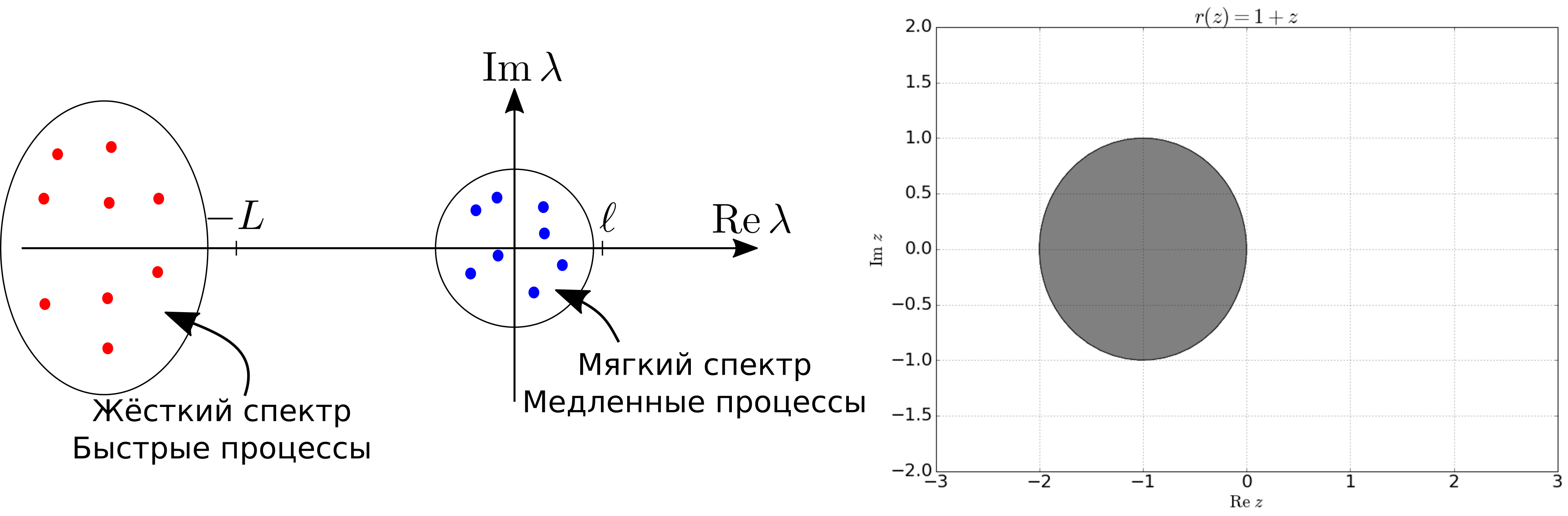
Спектр жесткой задачи¶
В спектре матрицы Якоби жесткой системы ОДУ можно выделить две зоны

Отношение $L/\ell \gg 1$ называется показателем жесткости задачи.
Решение жесткой задачи явным методом Эйлера¶
Проверка метода на жесткую устойчивость¶
Чтобы понять, годится ли тот или иной метод для решения жесткой задачи, необходимо применить его к модельному уравнению $$ \frac{dy}{dt} = \lambda y, \qquad \lambda \in \mathbb C,\; \operatorname{Re} \lambda < 0, $$ и посмотреть, будет ли решение затухать (отклонение от траектории будут уменьшаться) или, наоборот, расти (отклонение будет увеличиваться).
Функция устойчивости¶
Оказывается, что применение любого одношагового метода (например, любого метода Рунге-Кутты) к $y' = \lambda y$ дает следующий численный метод: $$ u_{n+1} = r(\lambda \tau) u_n, $$ где $r(z)$ — функция, зависящая только от самого метода. Эта функция называется функцией устойчивости данного метода. Легко видеть, что условие $|r(\lambda \tau)| \leqslant 1$ гарантирует отсутствие развития неустойчивости. Область значений $z$, где $|r(z)| \leqslant 1$ называется областю устойчивости метода.
Область устойчивости и спектр задачи¶
Для того, чтобы численный метод был жестко устойчив для данной задачи требуется, чтобы все жесткие собственные числа $\lambda_i$ задачи попали после умножения на $\tau$ в область устойчивости.
Функция устойчивости метода Рунге-Кутты¶
Для методов Рунге-Кутты существует удобная формула, выражающая $r(z)$ через коэффициенты таблицы Бутчера. $$ \begin{array}{c|c} c&A\\ \hline &b \end{array} \qquad r(z) = \frac{\det(E - zA + zB)}{\det(E - zA)}, \qquad B = \begin{pmatrix}1\\1\\\vdots\\1\end{pmatrix} b = \begin{pmatrix} b_1 & b_2 & \dots & b_n\\ b_1 & b_2 & \dots & b_n\\ {}&&\vdots\\ b_1 & b_2 & \dots & b_n \end{pmatrix} $$
Свойства функции устойчивости¶
Для метода Рунге-Кутты с $s$ стадиями $$ r(z) = \frac{P_s(z)}{Q_s(z)}, $$ где $P_s(z), Q_s(z)$ — многочлены степени не больше $s$. Если метод явный, то $Q_s(z) = 1$.
Свойства функции устойчивости¶
Сравним точное решение модельного уравнения $$ [y]_{n+1} = e^{\lambda \tau} [y]_n $$ и численное решение $$ u_{n+1} = r(\lambda \tau) u_n. $$ Условие сходимости порядка $p$: $\max_{n} |[y]_n - u_n| = O(\tau^p)$ влечет $$ r(z) = e^z + O(z^{p+1}) $$
Классификация методов по функции устойчивости¶
Если область устойчивости содержит левую комплексную полуплоскость $ \mathbb C^{-} = \left\{z \mid \operatorname{Re} z < 0\right\}, $ метод называется A-устойчивым (подходит для всех жестких задач).
Если область устойчивости содержит конус $\left\{z \mid \left|\frac{\pi}{2} - \arg z\right| < \alpha\right\}$, метод называется A$(\alpha)$-устойчивым (подходит для жестких задач, у которых жесткий спектр содержится в таком же конусе).
Если метод A-устойчив и дополнительно $ \lim\limits_{z \to -\infty} r(z) = 0, $ метод называется L-устойчивым. Позволяет интегрировать с большим шагом даже участки, где быстрые процессы еще не закончились, качественно повторяя картину решения.